6日目:台形加減速をライントレースに実装
昨日実験した台形制御をライントレースのプログラムに組み込んだ。 以前と比べ、直進時の加速・速度が飛躍的に上昇している。また、速度が安定したことでコーナーなどで機体が揺れることもなくなり安定した走行を見せている。 一見カー… 続きを読む »
昨日実験した台形制御をライントレースのプログラムに組み込んだ。 以前と比べ、直進時の加速・速度が飛躍的に上昇している。また、速度が安定したことでコーナーなどで機体が揺れることもなくなり安定した走行を見せている。 一見カー… 続きを読む »
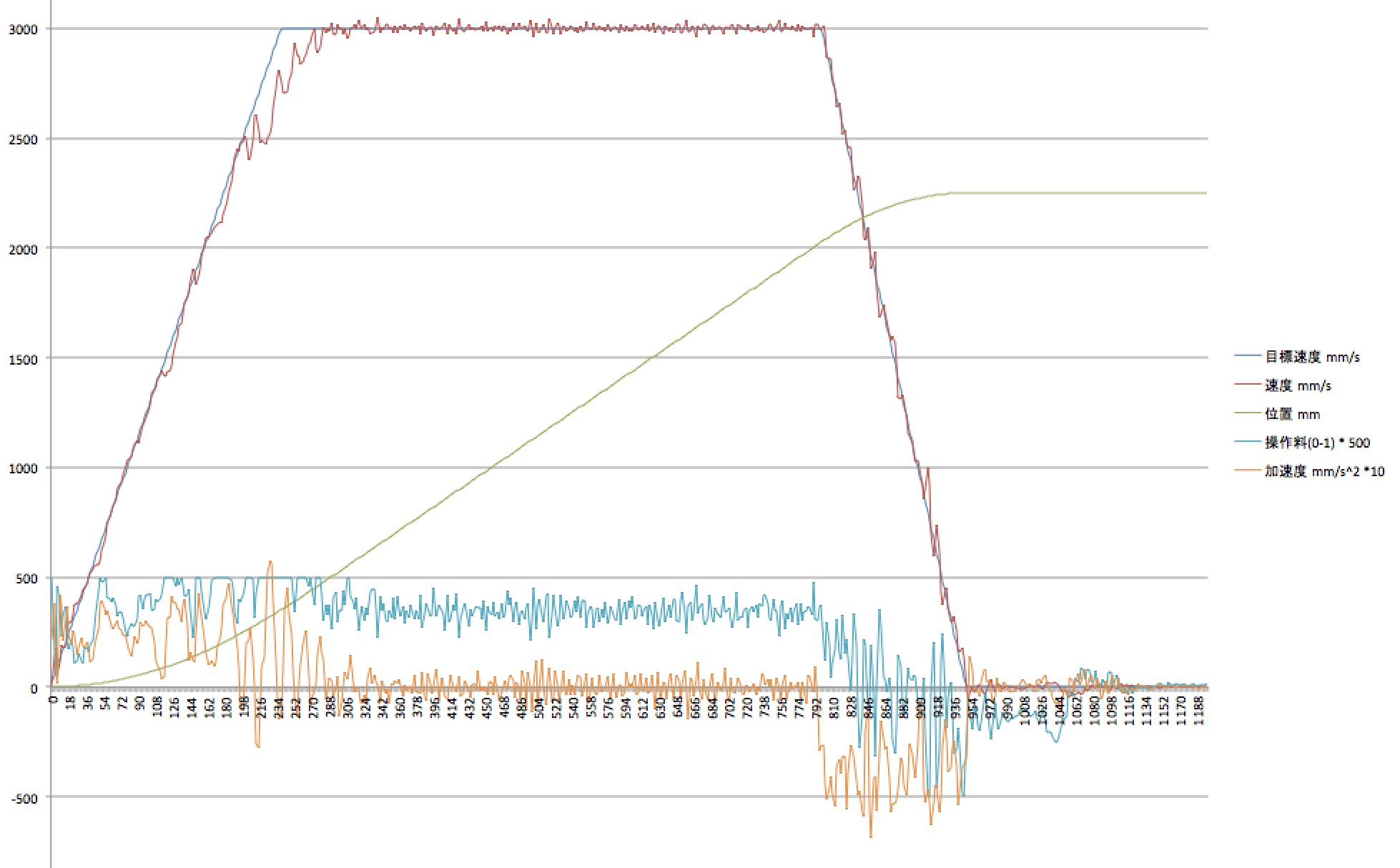
今日は台形制御の試験をした。 加速は12.5m/s^2 減速は16.0m/s^2 1.5m/sを超えたあたりから操作量が限界に張り付きはじめているので、もう少し加速度小さくした方… 続きを読む »
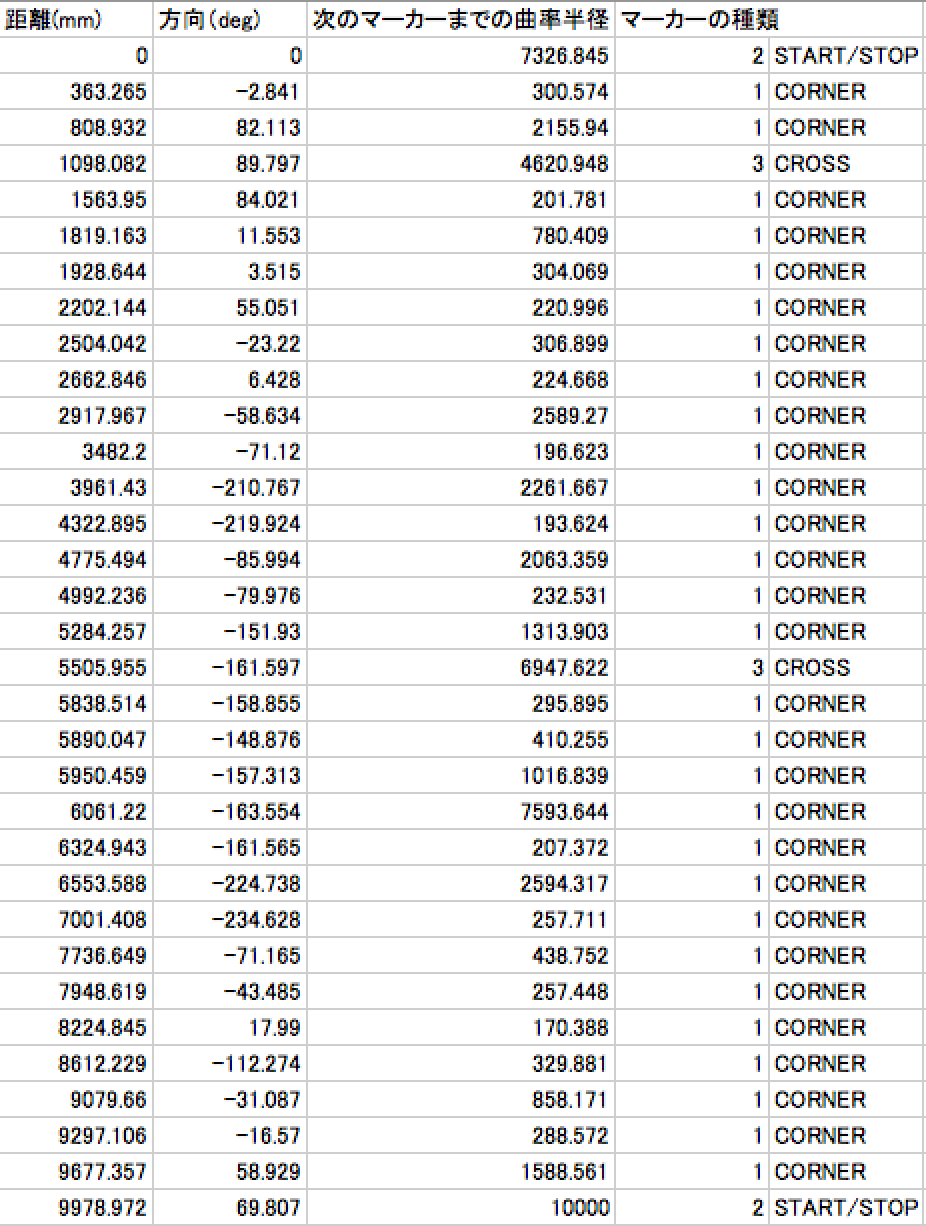
合同ロボコンではロンリウムが床材なので、実際にロンリウムにコースを引いて試してみた。 前回まで使用していたフィールドは曲率半径が一定だったのでテキトーに進行速度を決めていたが、今回は色々な曲率半径が存在するので、きちんと… 続きを読む »
東京・飯能旅行から帰ってきたのでライントレーサの続きを。 走行時に各マーカーの エンコーダで求めた、スタートからの走行距離(エンコーダの生の値) ジャイロで求めた角度(弧度法) を記憶するようにし、走行終了直後に 走行距… 続きを読む »
今日は時間がなかったためマーカー認識だけ https://www.youtube.com/watch?v=C5P0QMWpND8 また、この前言っていたソフトローハイトタイヤへタイヤを換装したところ、少しグリップ力が上が… 続きを読む »

関西の大学で開催している合同ロボコンに出場するためにライントレーサを作成中。 ルールはロボトレースに準拠。 昨日機体が組みあがったので、とりあえずテキトーなプログラムを作って試走させてみた。 機体はコチラのものをパク参考… 続きを読む »
mbed-sdkの秘密: オフライン・コンパイル こちらのサイトを参考にmbedのオフライン開発環境が整ったため、RTOSを動かそうと試みました。 しかしなぜかmbedのRTOSが動かない、動かないのでSTM32Cube… 続きを読む »
先日、EAGLE Hobbyist版を購入しました。 EAGLE本家ではアジアからHobbyistライセンスを買うことはできませんが、現在はadafruitより購入が可能です。 PayPalで支払うことが出来るので安全で… 続きを読む »
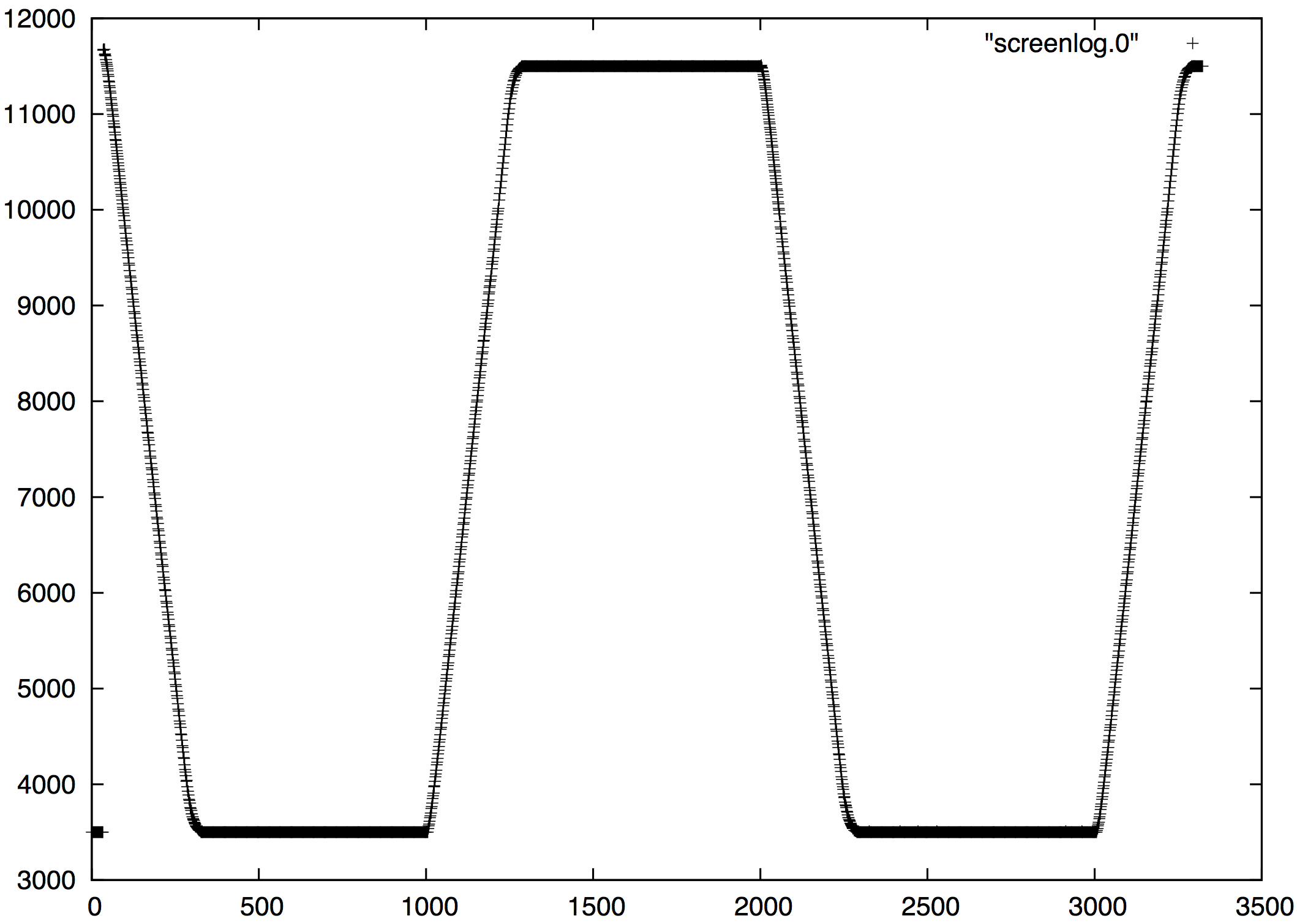
前回の回路を使用してサーボの角度を取得しながら角度を変更するプログラムを作成した。 雑ですが動作確認用ですのでご容赦ください。 実際に動作させて、シリアルで返ってきた値をグラフ化してみたらこんなかんじになりました。
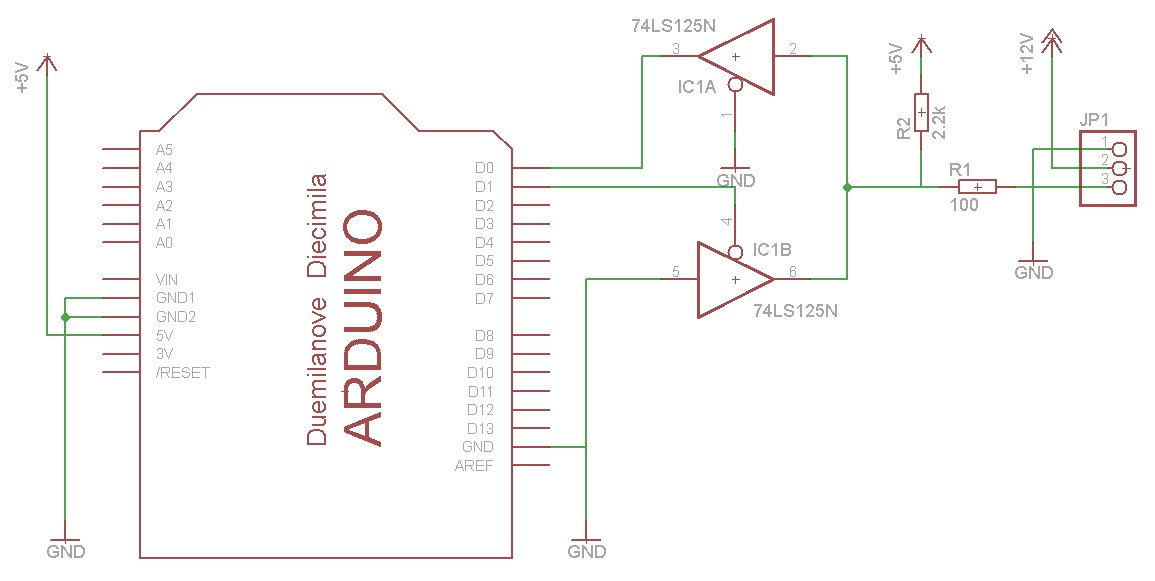
前回FT232でPCと通信したシリアルサーボを今回はArduinoで動かす。 参考サイト RS306MDのTTLコマンドのテストボード こちらのサイトを参考に3ステートバッファを使用してArduinoのシリアルを以下のよ… 続きを読む »