前回FT232でPCと通信したシリアルサーボを今回はArduinoで動かす。
参考サイト
RS306MDのTTLコマンドのテストボード
こちらのサイトを参考に3ステートバッファを使用してArduinoのシリアルを以下のように配線する。
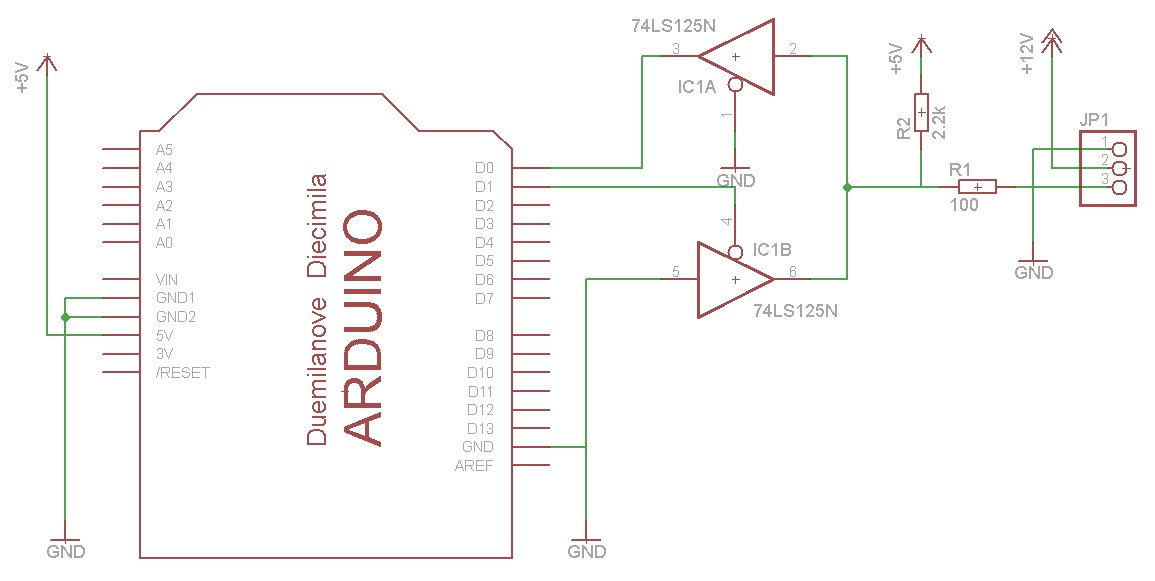
ここで注意しないといけないのは、こんな配線をしたらUSBからプログラムを書き込めないという点。
わざわざシールドを作って、毎回書き込む時にとりはずせばいいが、面倒なのでISPからプログラムを書き込むことにした。
また、シリアルデバッグが出来ないのは困るので、Arduinoのソフトウェアシリアルを余ったピンで使用して、前回使ったFT232でPCにつないでシリアルデバッグできるようにした。
次回はプログラムで角度の設定と取得をする。

ロボットと電子工作とプログラミング!
女の子は甘いもので出来てる?