2020年、バドミントン大国インドネシアの競技委員会によって定められた冷酷非道な大会Robomintonが開催されてから5年が経とうとしています。
ロボミントンに苦しみ、そして散っていった、全てのロボコニストOB・OG達を悼みこの記事を執筆致します。
Contents
サーブ
紹介し忘れていたサーブ機能について、動画を掲載しておきます。
人が行うショートサーブを打つ感じで実現しました。
ラケットを振るタイミングを調整することで弾道を若干変えることも可能となっていました。
問題点
さて、大会本番でうまく動かなかった原因等を記載しておこうと思います。
LRFの取り付けと木枠の高さ
その2で説明したように、ロボミントンのルールではフィールド外周に木枠が設置されていて、その木枠を検出することで自己の絶対位置を検出していました。
しかし、ロボミントンのルールでは木枠の高さが50mmと、非常に低く設定されていました。
そのため、上図のようにLRFを反転して設置し、少しでも検出点を低くするようにしていたのですが、それでもLRFが少し傾くと枠を検出できなくなることがありました。
大会中のテストランの時間は非常に限られており、その時間内にLRFの取付角度を調整することが容易にできないのが、問題点としてありました。
水平器を予め取り付けておくなどの工夫をしておくべきでした。
打点計算の精度とラケット位置制御
レシーブをする際の様子をスローで見てみます。
以下の2つの様子が見て取れます。
- ラケットがブレている
- アーム周りの動作によって足回りが揺れている
ラケットの位置制御には台形加減速を実装していましたが、KinectV2とEKFによるシャトルの予測軌道は十分に収束されていませんでした。
アームの目標姿勢が毎フレームごとに大きく移動するため、グラつきます。それによりKinectV2が揺れて、さらに検出がうまく行かなくなる問題がありました。
アーム周りを躍度最小軌道にしておけば、ここまで顕著にグラつくことはなかったでしょう。
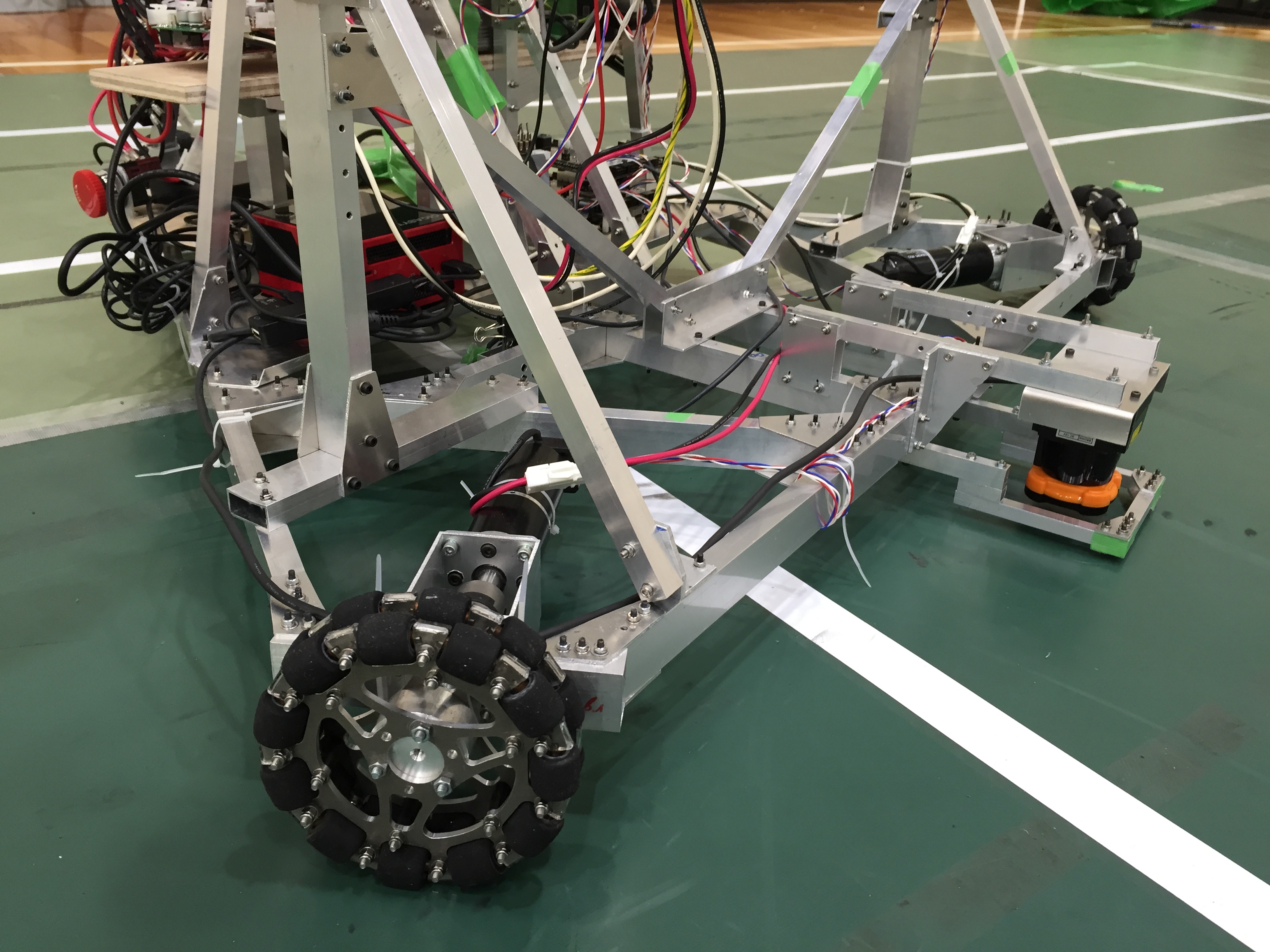
重心と足回りの加速性能
アームを情報に設置しているせいで、重心が非常に高いです。アーム移動時に車輪が浮くこともありました。
また、オムニホイールでは足回りの加速性能が不足しており、シャトルの落下点に移動するのに十分な加速性能を得られていませんでした。
そもそもシャトルの検出距離が不足している
検出できるのが打つ1秒前とか無理です…
外部デバイスの設置も検討していましたが、残念ながら間に合いませんでした。
おわりに
「ロボミントンはクソ」といった言葉があります。
確かに、1年弱しか制作期間のない学生ロボコンに適したルールではなく、問題の多いルールだったと思いました。
ですが、結果的に画像解析・点群処理・カルマンフィルタなどの技術を身につけることができ、メカ班の方々には(ロボミントン出場時点で)歴代最高のロボットを作成してもらえたと思っています。
チームメンバーへの感謝の意をもって、連載を〆させていただきます。
いや、でもやっぱロボミントンはクソだよ。

ロボットと電子工作とプログラミング!
女の子は甘いもので出来てる?
>>そもそもシャトルの検出距離が不足している
卓球に比べて難易度が高くなっているポイントですね。
当時のセンサ(学生の買える)ではシャトルサイズ・速度とフィールドの大きさに対してダイナミックレンジを大きく取れず…
そもそも論で外部カメラのキャリブレーションをどうするのか?の部分で苦労しました。
やはり今思い返してもロボミントンは歩行世代と同様の黒歴史としか思えません。