合同ロボコンではロンリウムが床材なので、実際にロンリウムにコースを引いて試してみた。
前回まで使用していたフィールドは曲率半径が一定だったのでテキトーに進行速度を決めていたが、今回は色々な曲率半径が存在するので、きちんとすることに。
遠心力fはmv^2/rなので、遠心力を一定にするなら曲率半径の平方根に比例させればいい。
速度制御はまだ実装していないので、直進成分のデューティー比に反映させただけ(いい加減速度制御しろ)
決行ケツをふっているが、これは減速時に滑らかに減速していないからだと思う。線の交差直前でも減速していたりして、プログラムとしてはまだまだヤッツケ感が残ってる。
また、探索走行のログを見てみるとこんな感じに
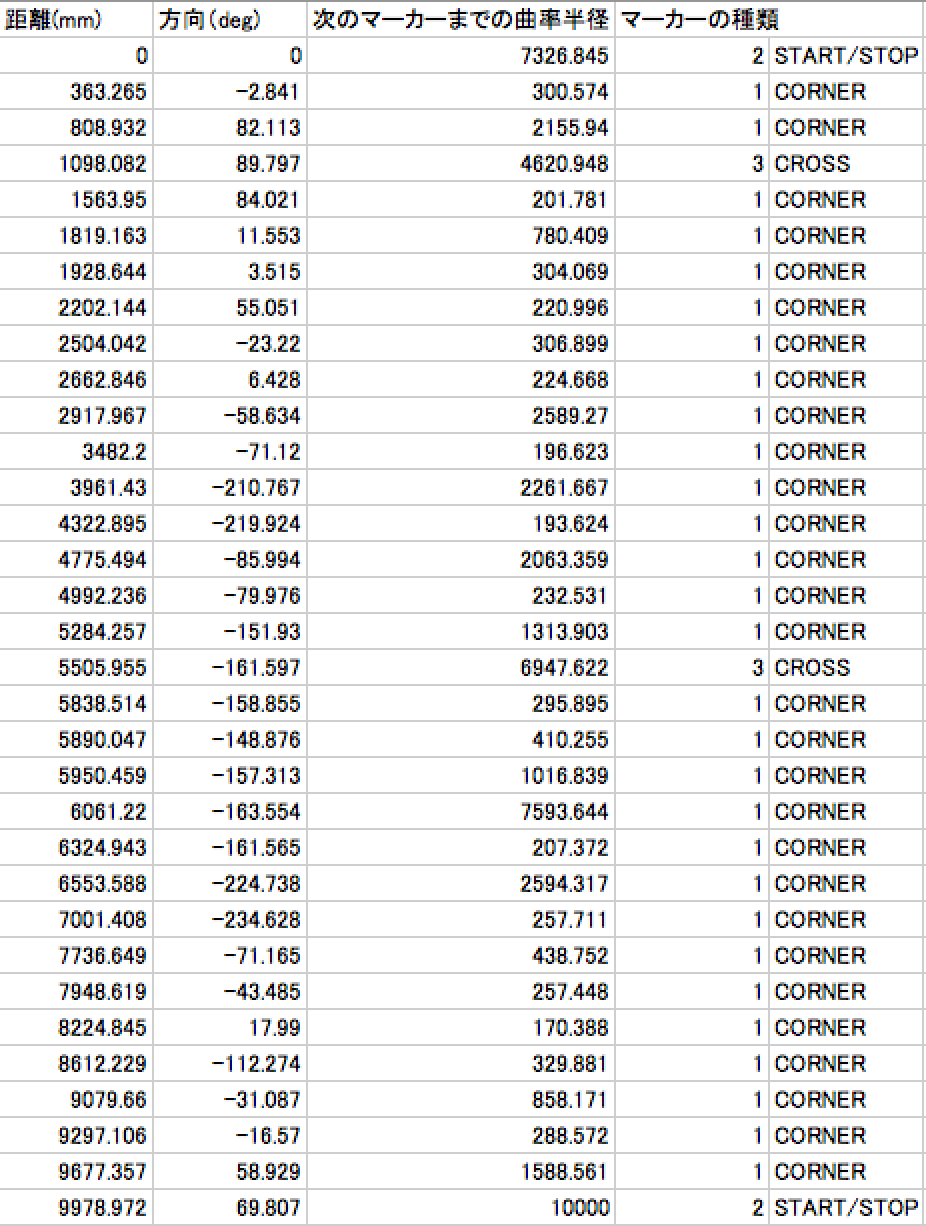
スタートとゴールの角度全然違うじゃん…
まだまだ調整が必要。

ロボットと電子工作とプログラミング!
女の子は甘いもので出来てる?