今更ロボミントンを振り返る その4
今回は軌道予測と打点の決定方法についてです シャトルの軌道予測 まず、以下の文献を参考に、軌道予測の方法を考えました。 パーティクルフィルタとカルマンフィルタを補完的に利用したバドミントン映像からのシャトル軌道推定 モー… 続きを読む »
今回は軌道予測と打点の決定方法についてです シャトルの軌道予測 まず、以下の文献を参考に、軌道予測の方法を考えました。 パーティクルフィルタとカルマンフィルタを補完的に利用したバドミントン映像からのシャトル軌道推定 モー… 続きを読む »
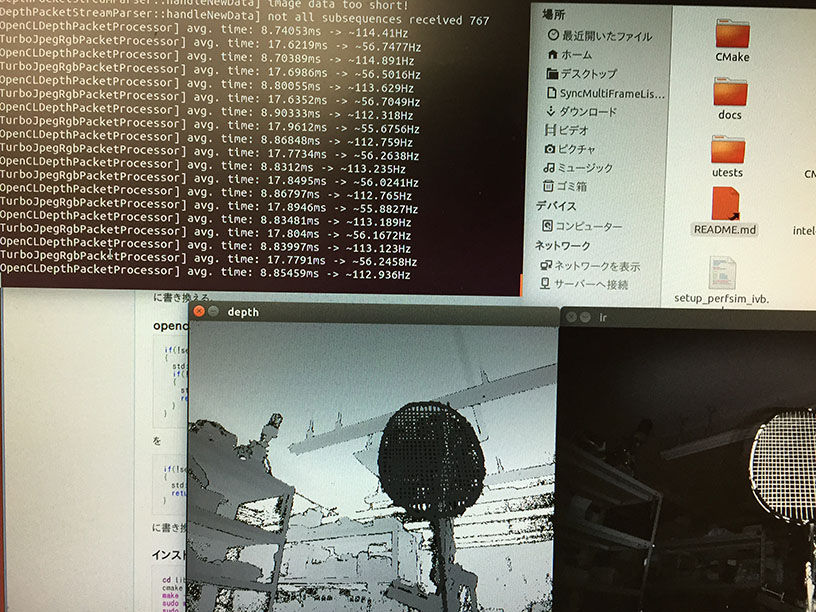
今回はKinectやシャトル検出について書こうと思います。 シャトルの検出 とりあえずKinectV2をUbuntuで動かす ROSを使用するためUbuntuでロボットの開発を行っていたのですが、MicrosoftはKi… 続きを読む »
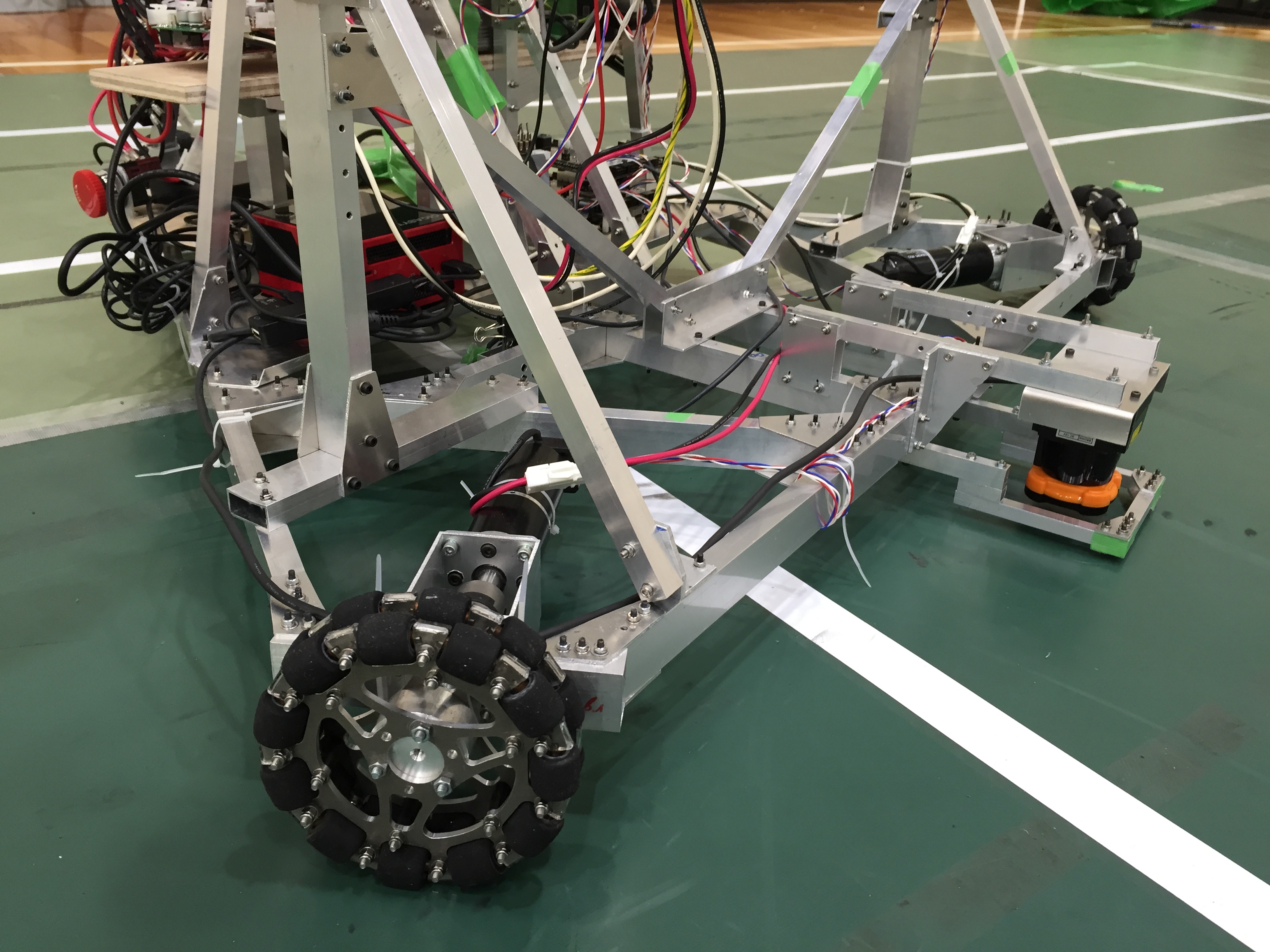
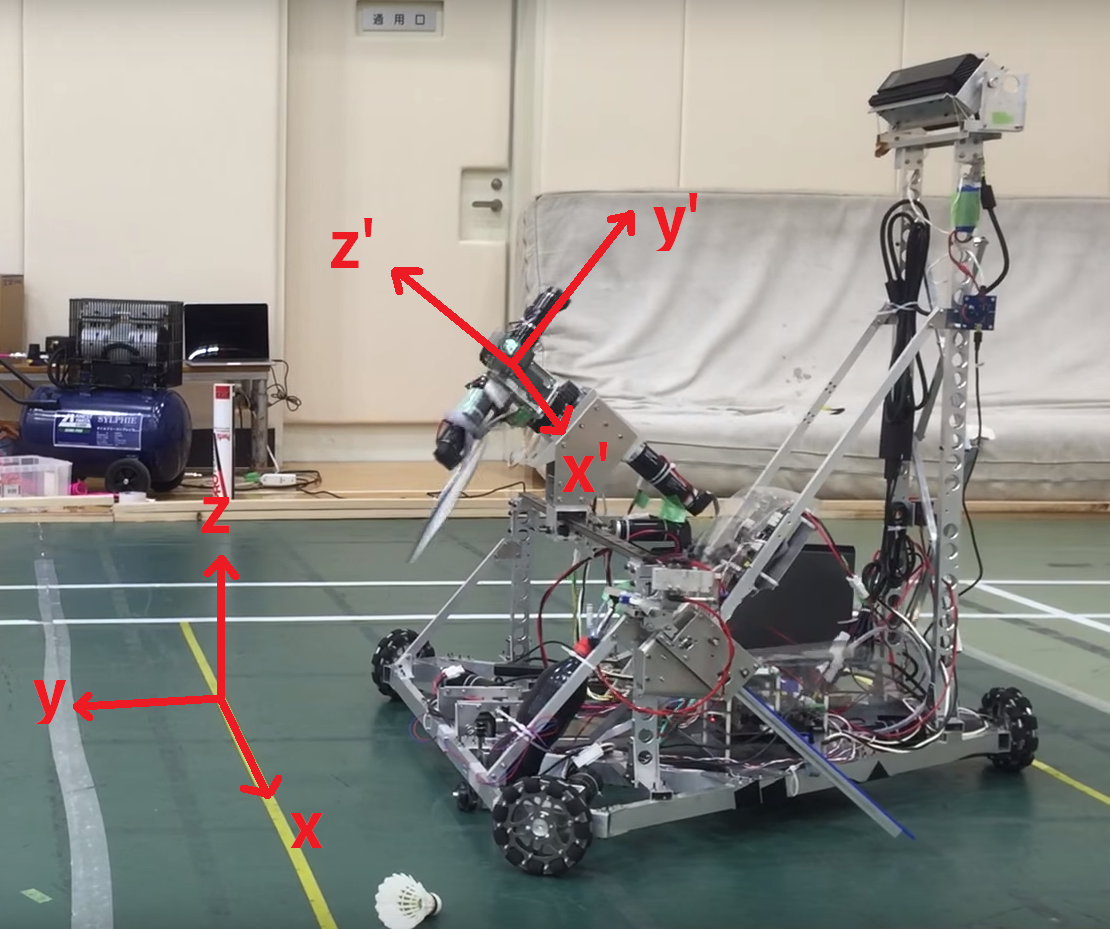
前回に引き続きロボミントンの振り返りです。 センシング ロボミントンで全自動を行うのに最低限必要なデータはたった2つです。 ロボットの位置・姿勢 シャトルの軌道 とまあ言うのは簡単ですが、これがなかなか難しいです。 ロボ… 続きを読む »
序文 今月3月、大学を卒業します。卒業を前に色々思い返すと、ロボコンの話をパブリックな場所にきちんと残していなかったことに気づきました。 なので、NHK学生ロボコンにおいて僕が最後に出場した大会「ロボミントン」(2015… 続きを読む »
以前書いたUbuntu 14.04にBeignet1.0.0をインストールする話に続いて、KinectV2をROSで動かします。 Mac, LinuxでKinectV2を使用するには、libfreenect2をするのです… 続きを読む »
ロボコンでROS使おうと決めたもののArduinoは甘えだから使いたくない(Arduinoにはエンコーダインターフェースがないから使いたくない) ということでrosserialを普段から使ってるSTM32に移植しようと考… 続きを読む »

合同ロボコンに参加してきた。 結果は一般の部優勝。 2位の人と2秒以上差をつけ、11秒弱でゴールすることができた。 (大会前日に機体にガタが来ていたこともあり、動作するかかなり不安だった…) 一昨日実装した台形加速のライ… 続きを読む »
昨日実験した台形制御をライントレースのプログラムに組み込んだ。 以前と比べ、直進時の加速・速度が飛躍的に上昇している。また、速度が安定したことでコーナーなどで機体が揺れることもなくなり安定した走行を見せている。 一見カー… 続きを読む »
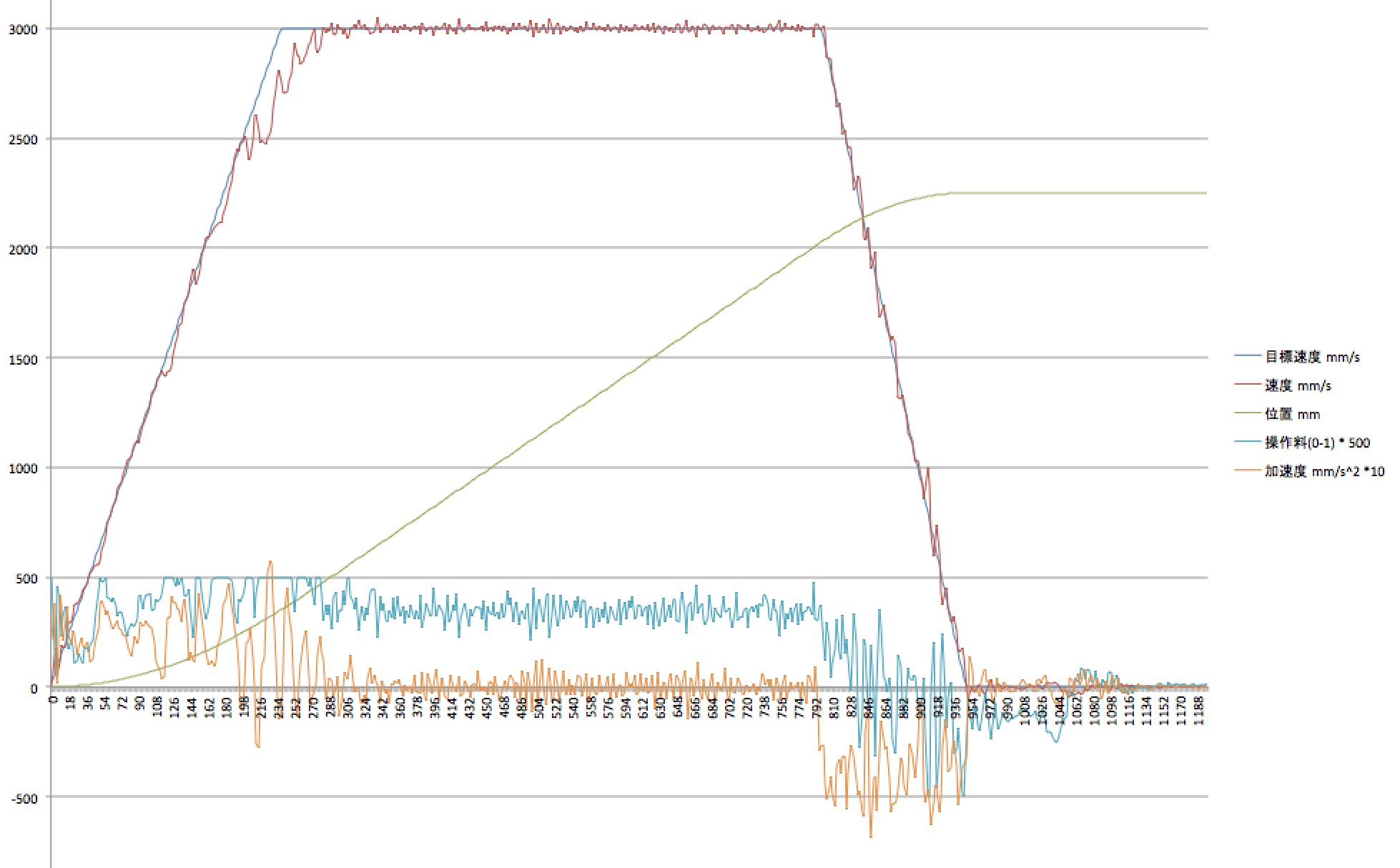
今日は台形制御の試験をした。 加速は12.5m/s^2 減速は16.0m/s^2 1.5m/sを超えたあたりから操作量が限界に張り付きはじめているので、もう少し加速度小さくした方… 続きを読む »
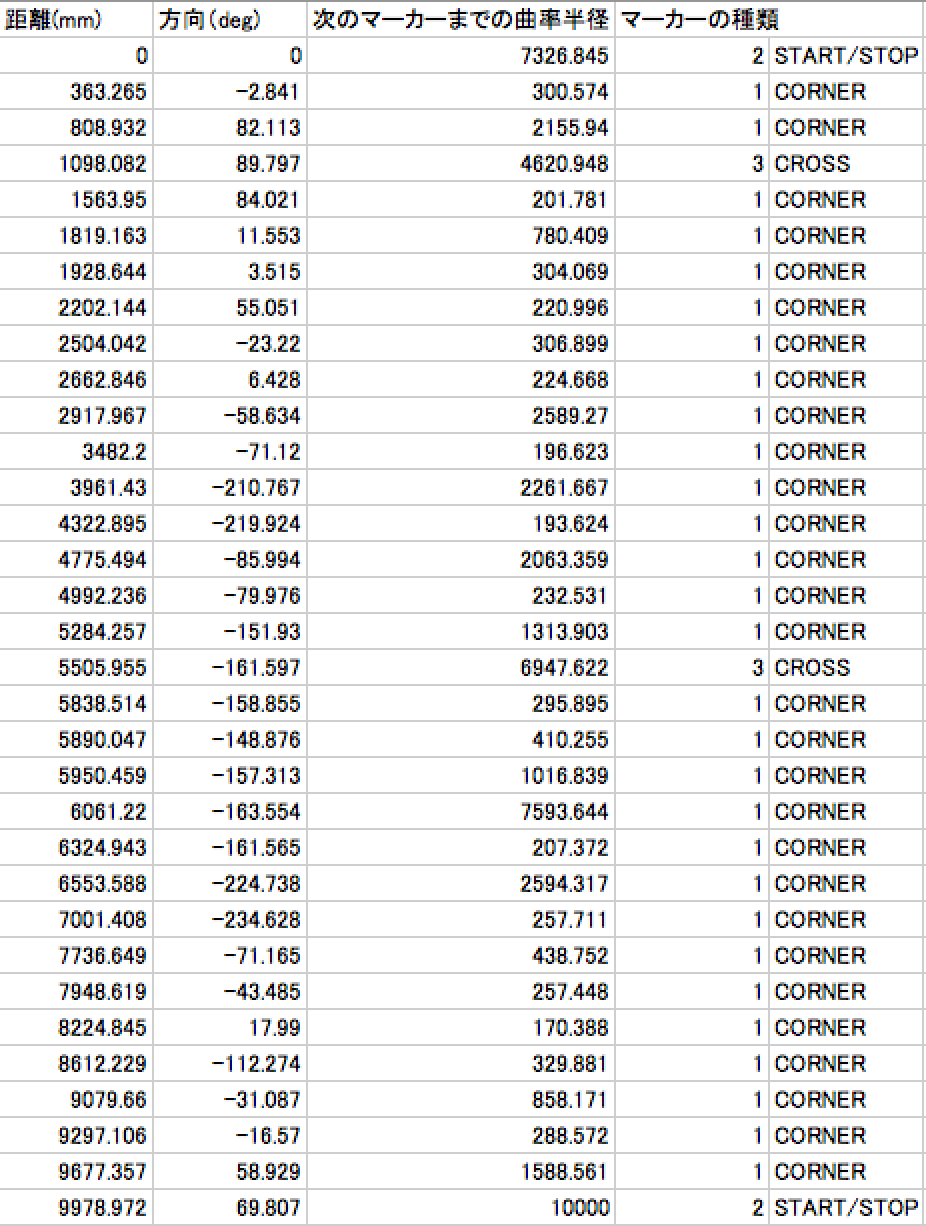
合同ロボコンではロンリウムが床材なので、実際にロンリウムにコースを引いて試してみた。 前回まで使用していたフィールドは曲率半径が一定だったのでテキトーに進行速度を決めていたが、今回は色々な曲率半径が存在するので、きちんと… 続きを読む »