IoTサイコンを作る(4) ~STM32とsakura.ioの通信~
sakura.ioを用いたIoTサイコンを作るシリーズ第4弾です。 今回はSTM32とさくらの通信モジュールの通信方法について説明します。 通信インターフェース さくらの通信モジュールでは通信方式としてI2CとSPIのど… 続きを読む »
sakura.ioを用いたIoTサイコンを作るシリーズ第4弾です。 今回はSTM32とさくらの通信モジュールの通信方法について説明します。 通信インターフェース さくらの通信モジュールでは通信方式としてI2CとSPIのど… 続きを読む »
sakura.ioを用いたナウでIoTなサイコンを作るシリーズ第3弾です。 今回はSW4STM32( System Workbench for STM32 )を使用したプログラミングの仕方を説明します。 SW4STM32… 続きを読む »

前回の続きです。 STM32CubeMXを使って、回路図に従いマイコンのGPIO・ペリフェラルの設定を行っていきます。 MCUの選択 New project -> MCU Selector -> STM32L… 続きを読む »
さくらインターネットからサービス提供されているsakura.ioを用いてサイコンを作成するシリーズ第1弾です。 sakura.ioについての説明はこちら記事を見てください。 sakura.ioとは何なのか 使用部品 マイ… 続きを読む »

はじめに 巷でIoTブームが起きている中、さくらインターネット株式会社がsakura.ioたるサービスの正式リリースを開始しました。 今回はIoTとsakura.ioについて解説したいと思います。 IoTとは 近年IoT… 続きを読む »

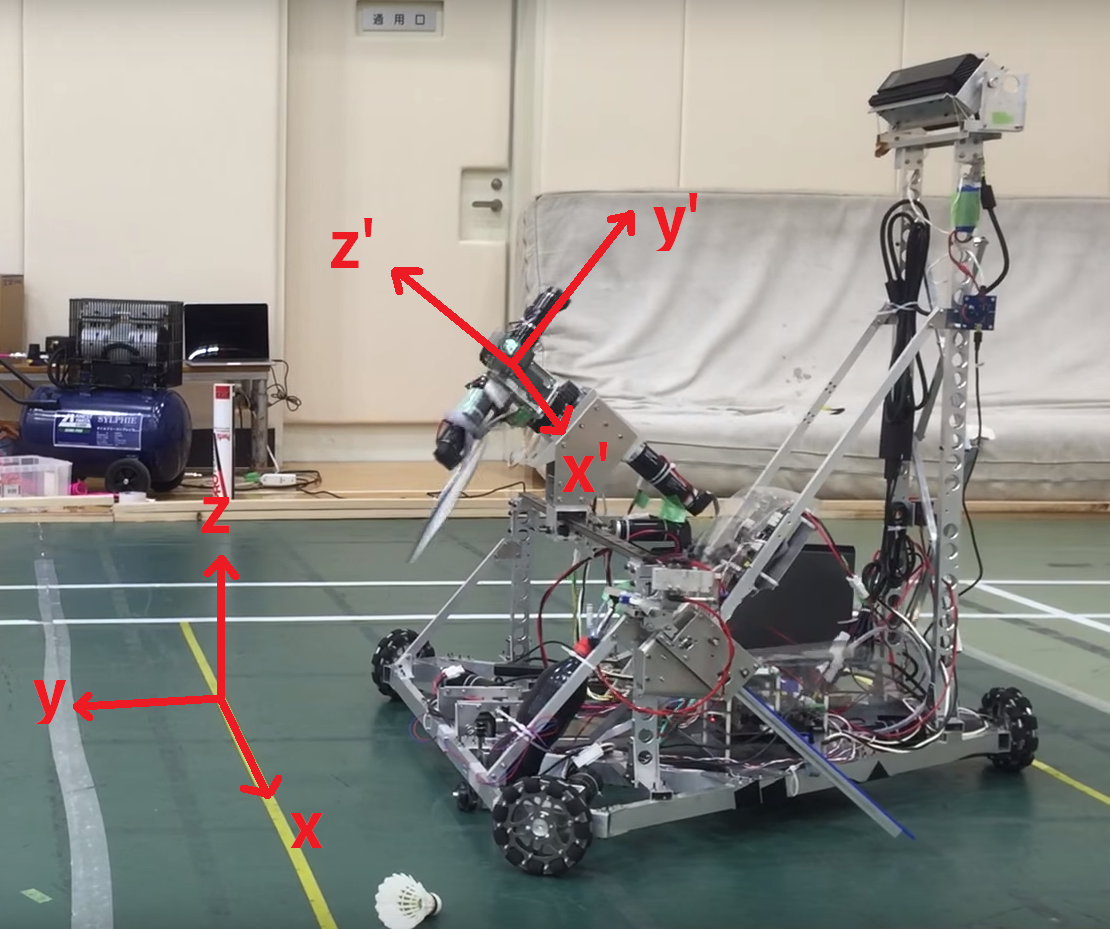
※この投稿は以前Google+に投稿していたものです。 大会1週間前に機体もない状態(輸送済み)でいきなり全てのプログラムを頼まれるという無茶振りをされたわけですが、なんとかGPSベースの位置制御だけは作れました。 出国… 続きを読む »
Ubuntu16.04でオンボードのEthernetコントローラ(I219-V)が動かなかったので対処法を書いておきます。 まず、問題が起きた環境を以下コマンドで確認。 次に、動かない原因を下記コマンドで調べます。 チェ… 続きを読む »
今回は軌道予測と打点の決定方法についてです シャトルの軌道予測 まず、以下の文献を参考に、軌道予測の方法を考えました。 パーティクルフィルタとカルマンフィルタを補完的に利用したバドミントン映像からのシャトル軌道推定 モー… 続きを読む »
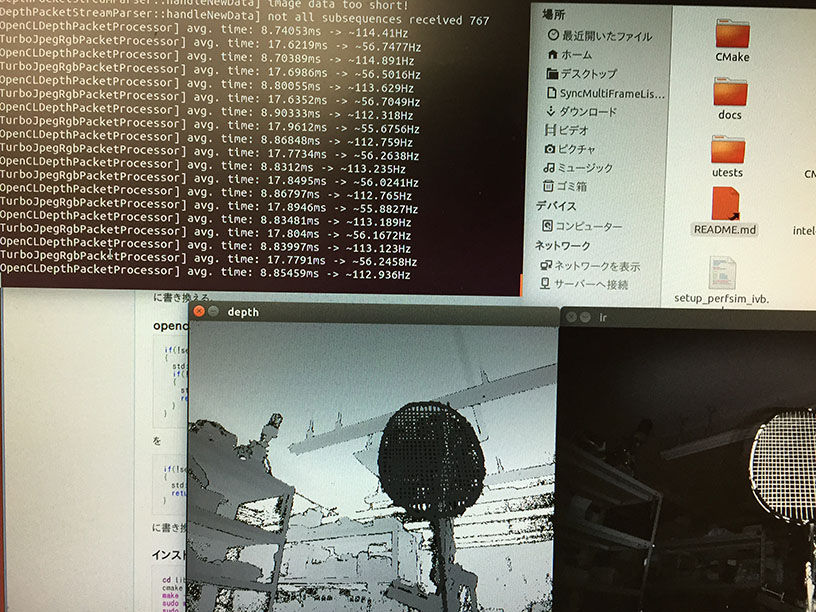
今回はKinectやシャトル検出について書こうと思います。 シャトルの検出 とりあえずKinectV2をUbuntuで動かす ROSを使用するためUbuntuでロボットの開発を行っていたのですが、MicrosoftはKi… 続きを読む »
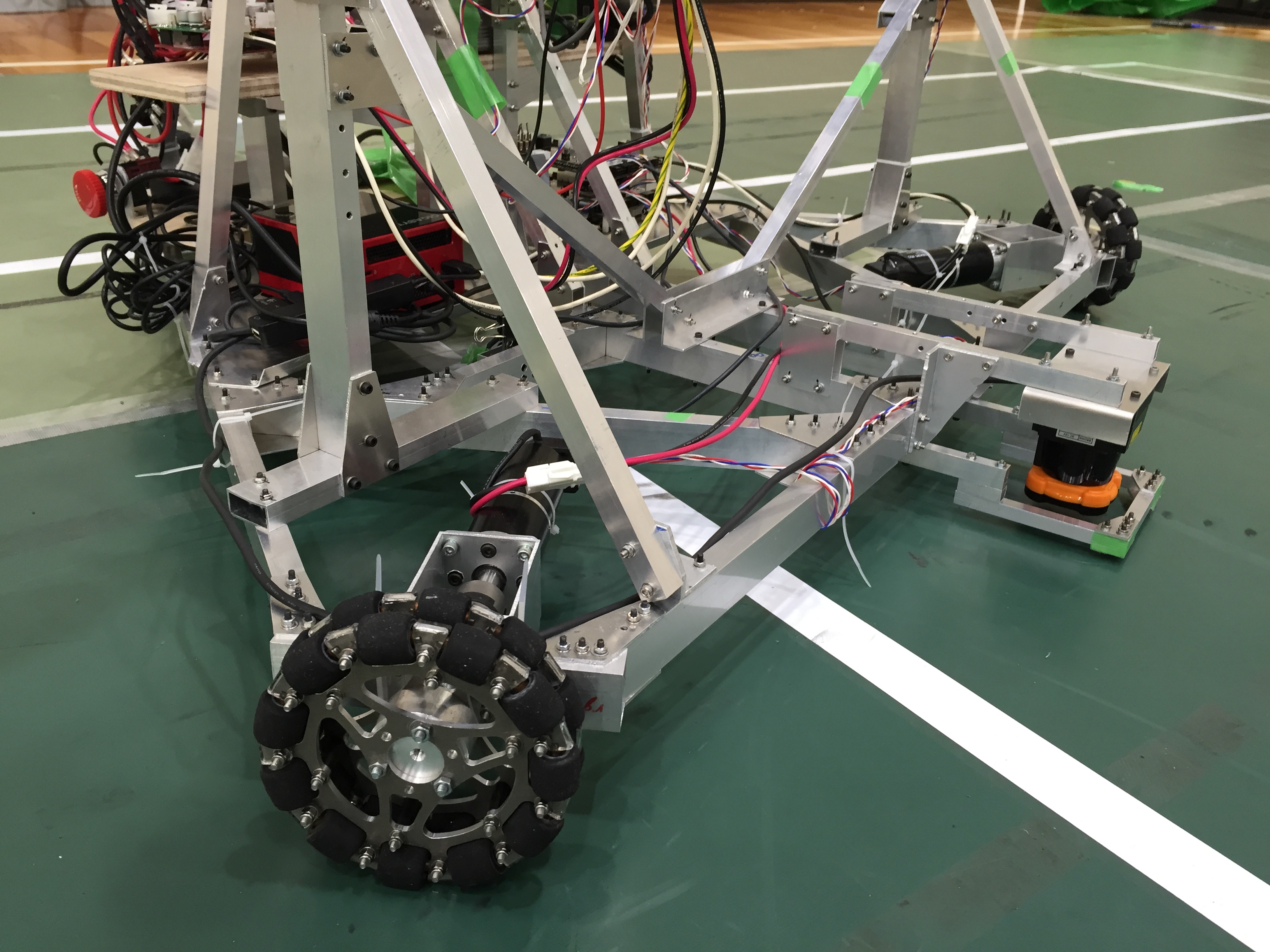
前回に引き続きロボミントンの振り返りです。 センシング ロボミントンで全自動を行うのに最低限必要なデータはたった2つです。 ロボットの位置・姿勢 シャトルの軌道 とまあ言うのは簡単ですが、これがなかなか難しいです。 ロボ… 続きを読む »