RoboCup サッカー SSL(Small Size League)にチームScrambleのメンバーとして参加してきました。
Contents
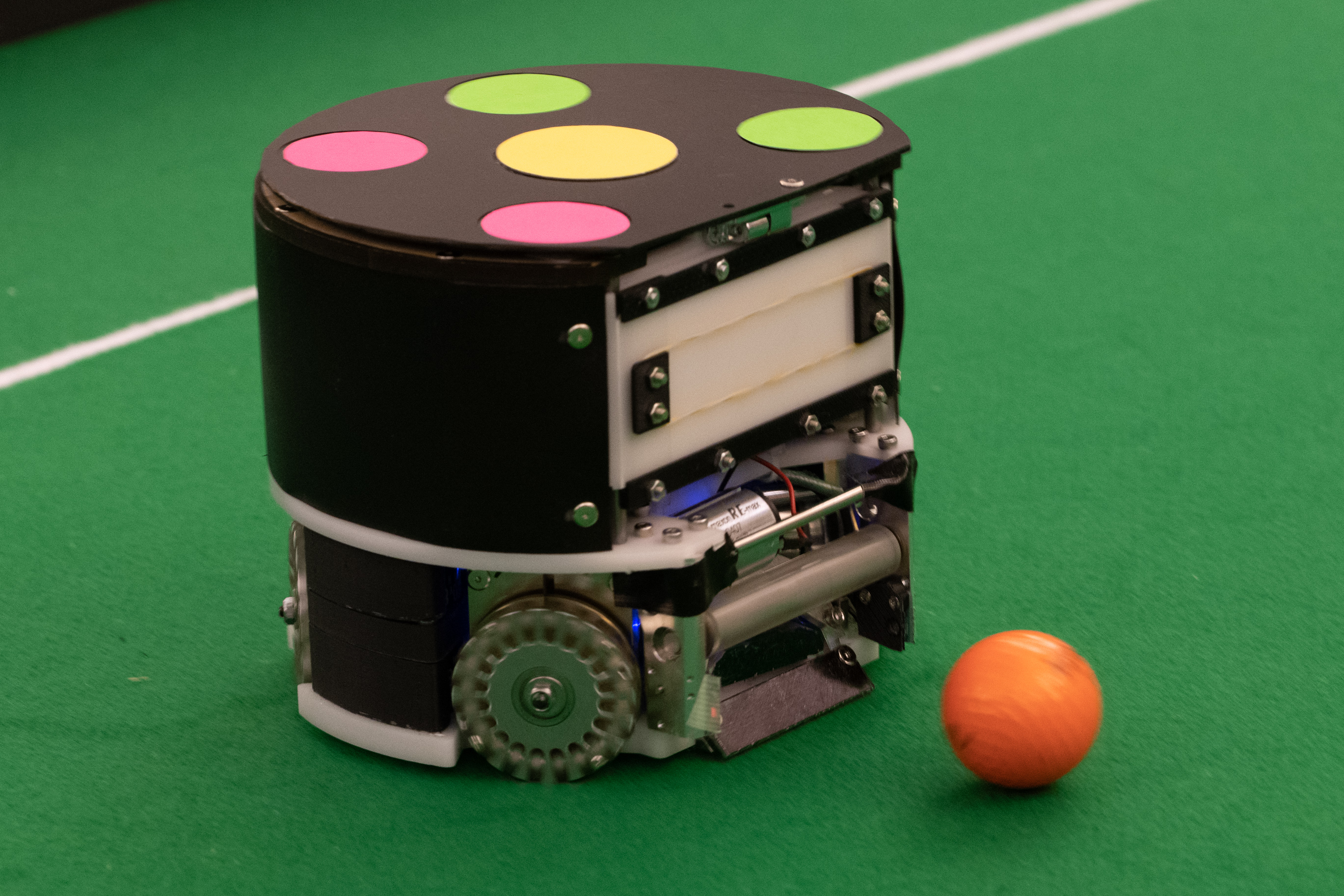
ロボカップ サッカーとは
「西暦2050年までに、サッカーの世界チャンピオンチームに勝てる、自律移動のヒューマノイドロボットのチームを作る」という目標をもとに、自律ロボットでサッカーをする大会です。
チームScrambleとは
NHK主催の大会、高専ロボコン及び学生ロボコンのOB・OGで構成されたRobocup SSLのチームです。2017年に結成され、今年始めて大会に参加しました。
担当
回路班の中でメインボードの回路設計、及びプログラミングを担当しました。
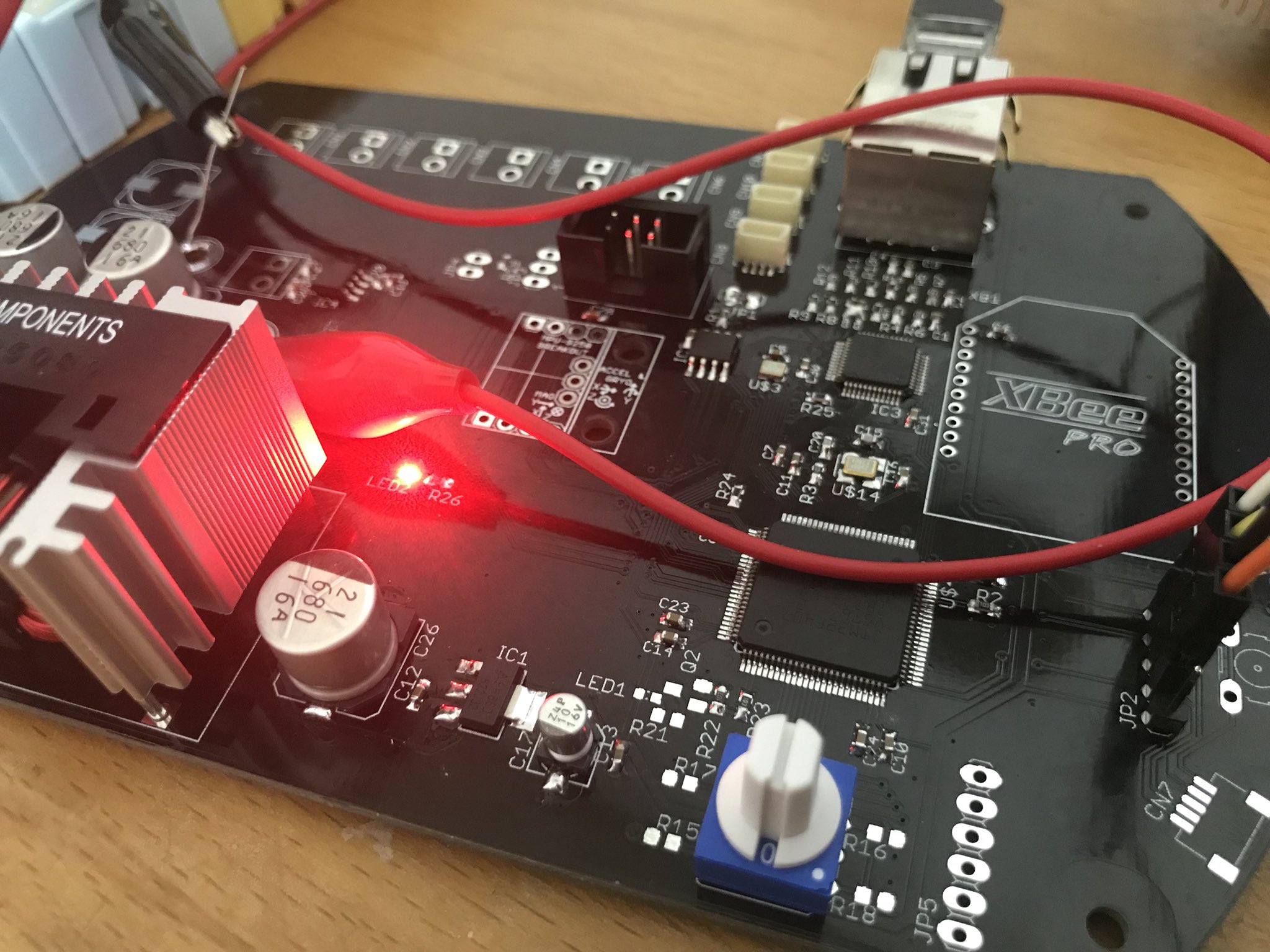
メインボードについて
メインボードはAI(司令塔となるコンピュータ)から無線で命令を受信し、各アクチュエータを動かす役目を担っています。
今回作成したメインボードにはSTM32マイコンを搭載しており、以下の機能を担っています。
- LANを通じてAIから送られてくるUDPパケットを受信する。
- AIからきた命令を変換し、RS-485通信でモータードライバやキッカーに命令を送る。
AIからは無線で命令を送る必要があるため、ロボットにはポータブルWi-FIルータを搭載しています。
そのWi-Fiルータを子機モードに設定し、AI側に用意されている別のWi-Fiルータにブリッジ接続します。
これによってマイコンと子機(ポータブルルータ)は有線で接続しつつ、AIとの無線通信を確立しています。
ソースコード
回路図と共にGitHubで公開しています。
STM32のEthernet機能に関しては後日別の記事で解説しようと思います。
結果
大会当日に組み上がったロボットが何故か動きました。
2試合目にはなぜか4台に増えました。
次回はまともなスケジュールで開発したい…したくない?
また、日本ロボット学会賞を受賞しました。
感想
Keep programming

ロボットと電子工作とプログラミング!
女の子は甘いもので出来てる?